Paper Title: Exploring various neural network configurations for the NN- based MPC in Multiagent System
Authors: Piyush Chaubey, Anilkumar Markana, Dhaval Vyas, Deepak Kumar Goyal
Corresponding Author: Anilkumar Markana (Anil.markana@spt.pdpu.ac.in)/ India
Abstract
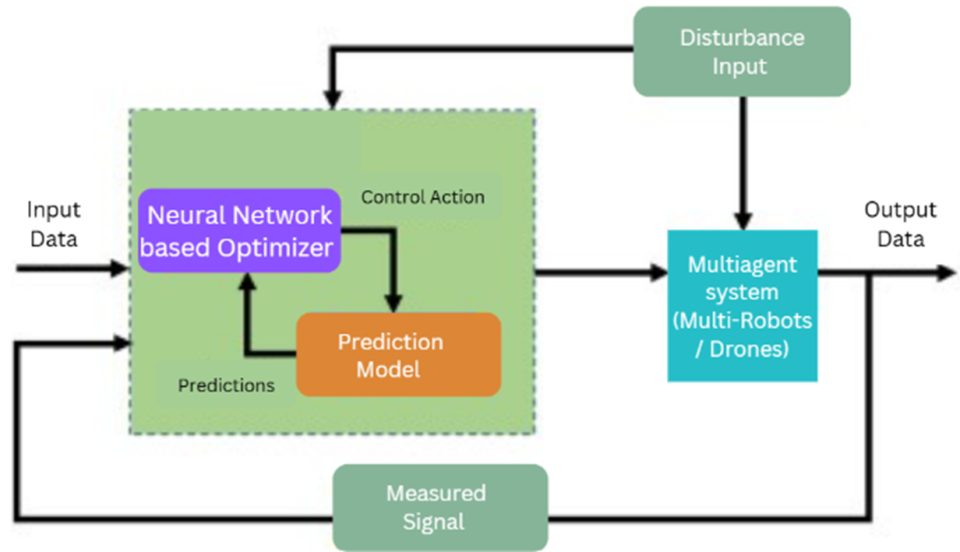
Multi-robot cooperation, unmanned aerial vehicle (UAV) formation control, intelligent transport systems, and distributed sensor networks are just a few domains where multi-agent systems are crucial, as they require coordinated behavior to achieve common goals such as exploration, resource allocation, distributed sensing, and target tracking. This paper investigates various neural network configurations utilized in the NN-MPC framework for consensus control of multi-agent robotic systems. The NN-MPC control is applied to the consensus problem of a leader-follower multi-agent system, where agents coordinate to achieve collective behavior. In this approach, MPC is utilized to predict the future values of the control objective, which is optimized by minimizing a cost function with various neural network architectures. Different neural network configurations based on feed-forward, recurrent neural networks, Fitnet, and cascade networks are explored for the NN-MPC-based multi-agent systems. The analysis is performed through a simulation-based model of a quadrotor fleet system. Results show that the follower agents achieve consensus 60% faster than with RNN-MPC in comparison to the feedforward neural network, whereas the results are more effective when compared with the cascade network configuration-based MPC, where agents reach consensus 90% early if paired with suitable training structures. Overall, the article contributes to the recent topic of research on learning-based MPC of the multi-agent system in achieving consensus for the leader-follower strategy.
Keywords
Model predictive control, Neural network architectures, Multi-agent systems, Leader-follower, Consensus
Cite:
Chaubey, P. ., Markana, A. ., Vyas, D. ., & Goyal, D. K. . (2025). Exploring various neural network configurations for the NN- based MPC in Multiagent System. Future Technology, 5(1), 148–158. Retrieved from https://fupubco.com/futech/article/view/566